
Today we tested several rover chassis for the FlowPaw rover kit:
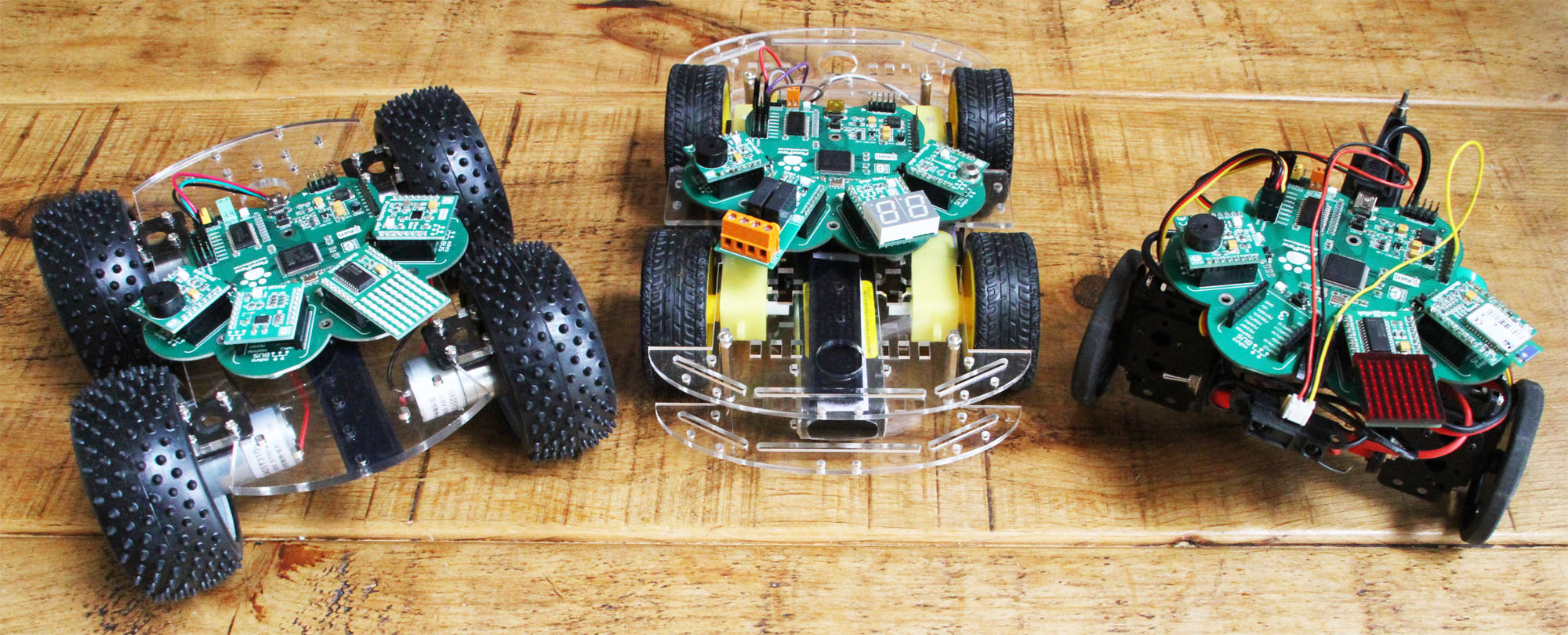
See how we got on…
Rover 1 – LynxMotion Rover (Part of the Servo Erector Set)
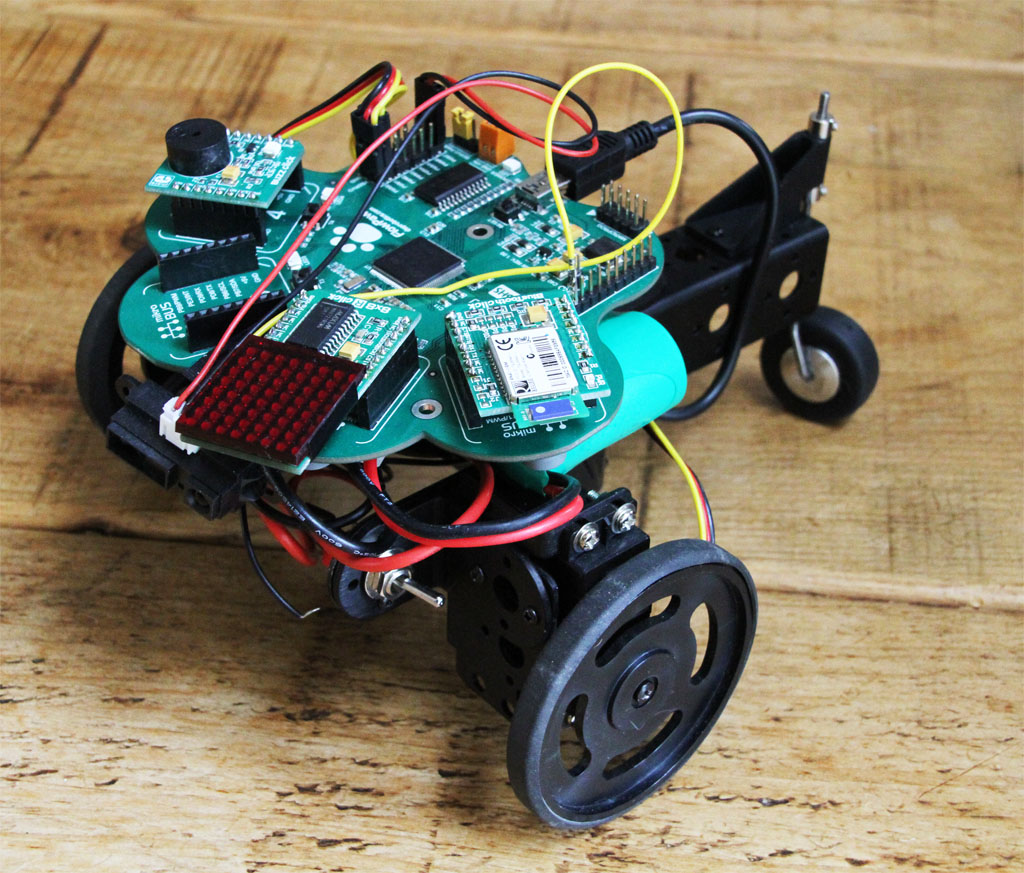
+ve points: Works really well, very maneuverable, uses continuous motion servos that connect directly to the FlowPaw board (no motor controller needed). Works well on all surfaces (carpet and hard floor).
-ve points: A little small for the FlowPaw board if you want to mount anything else.
Rover 2 – Yellow Rover
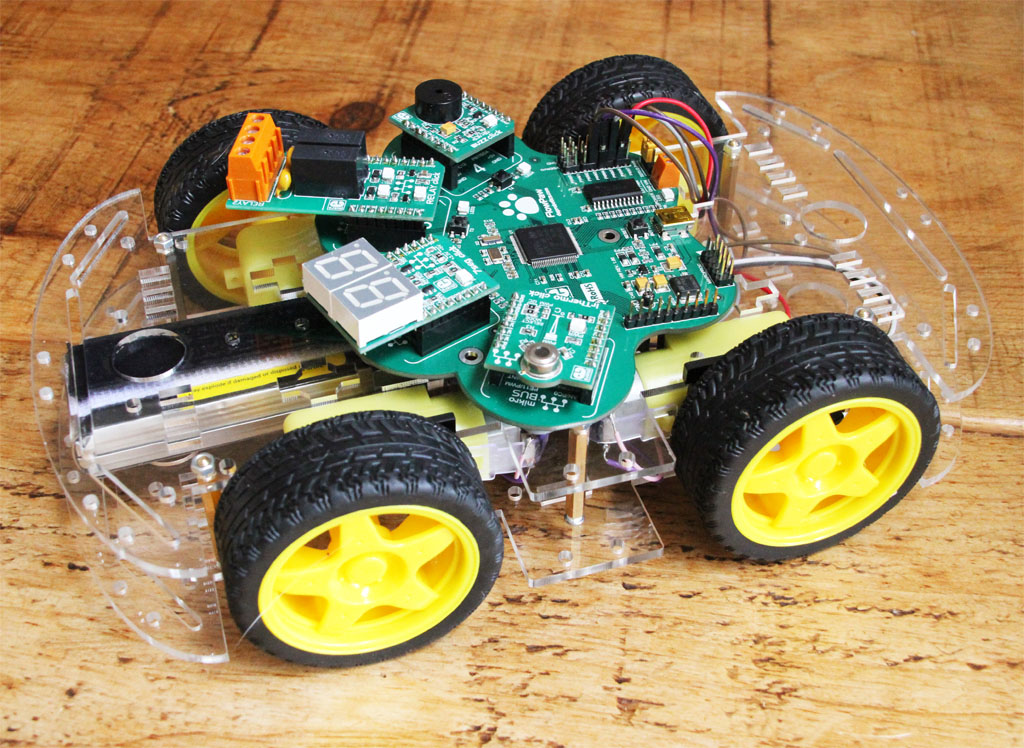
+ve points: Works really well, very maneuverable, and fast, good price, lots of space for other components. Works well on all surfaces (carpet and hard floor).
-ve points: Needs a separate Motor controller, motors not pre-wired (soldering required)
Rover 3 : Blue Rover
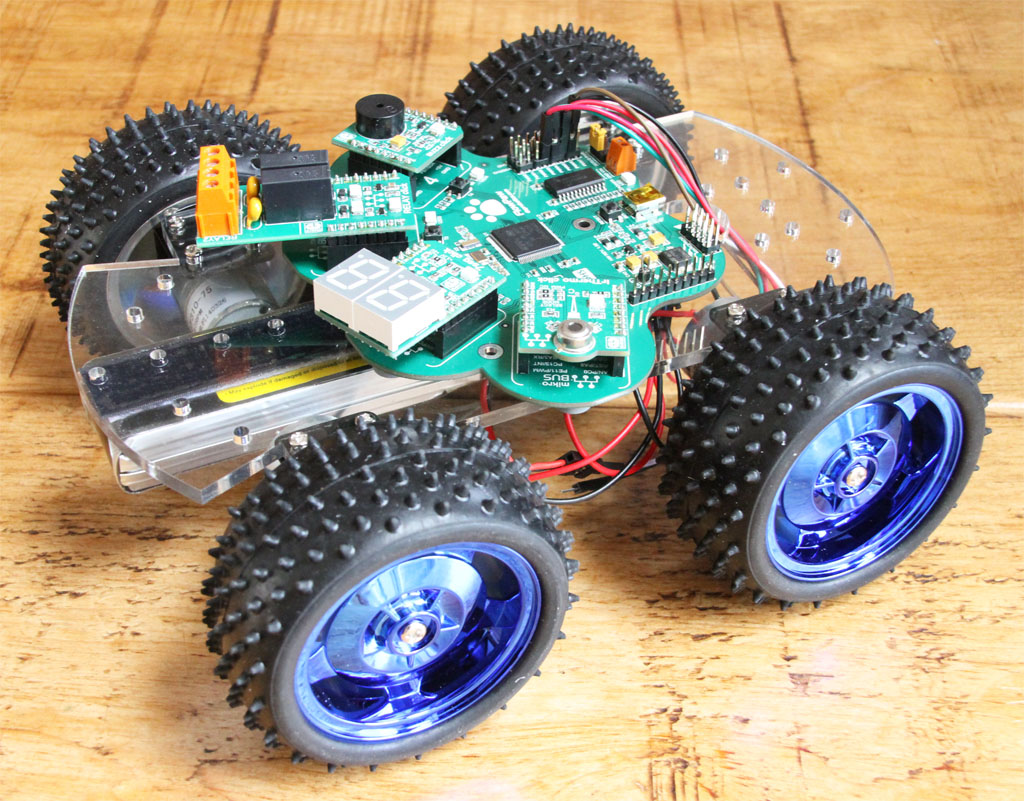
+ve points: Looks cool, fast, lots of space for other components.
-ve points: Needs a separate Motor controller, doesn’t work on carpet (the wheels are too knobbly and wont skid – needed for turning), motors are pre-soldered with wires, expensive.
So the winner is : Rover 2 – The Yellow Rover!
Here’s the FlowStone code we used to control it using an Xbox games controller:
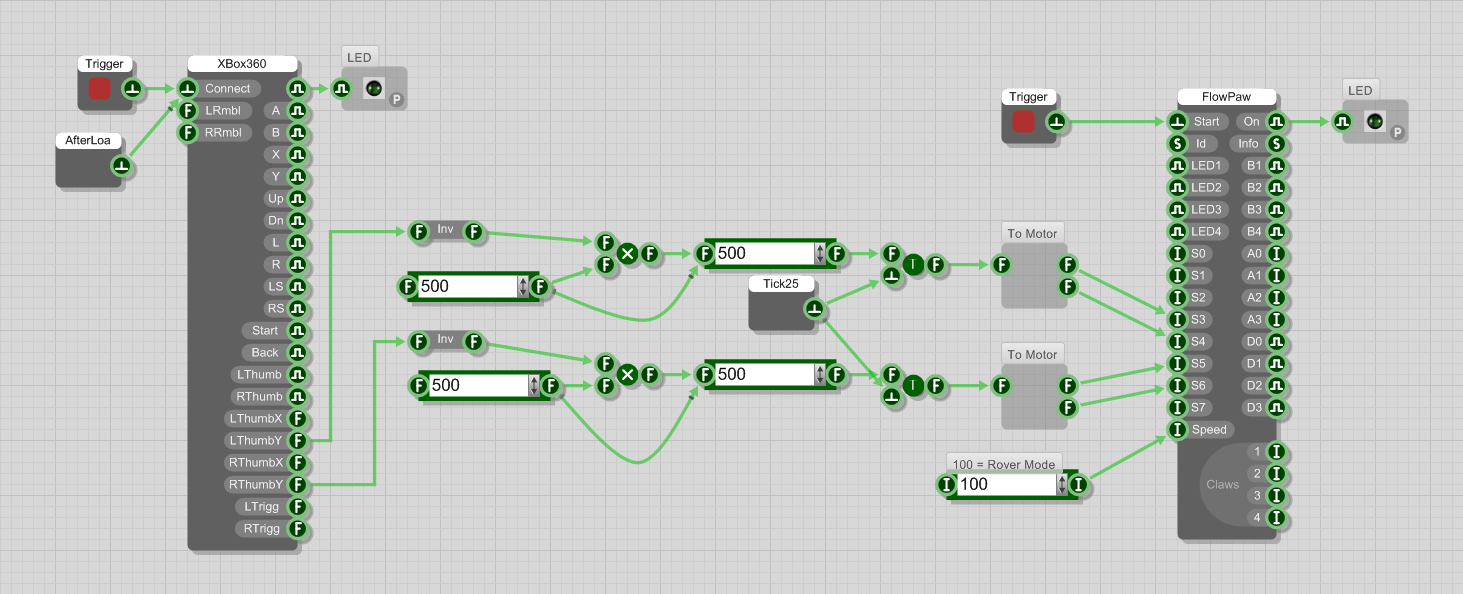
- Input S3 = Left wheels Forwards
- Input S4 = Left Wheels Backwards
- Input S5 = Right Wheels Forwards
- Input S6 = Right Wheels Backwards